

About This Project
Learn how to create a STEPPER BOT Using Arduino.
Project Info
- Programming Platform: Arduino IDE
- Difficulty: Intermediate
- Estimated Time: 30 min
- Category: Arduino
- Tags: Arduino, Robotics, Stepper Motor With Driver,Jumper Wires, Battery
Introduction
Stepper motors are DC motors that rotate in precise increments or “steps” and are used to position something precisely. These devices are controlled by applying pulses of DC electricity to their internal coils. These reliable and economical motors are used in a variety of applications and industries.
Stepper motors can be positioned accurately. Besides, these can be moved forward or backward one ‘step’ at a time, and can also rotate continuously. While using the stepper motor, one needs to cross-check the power supply with an oscilloscope if possible before writing off the motors. If there is a low power supply, the steppers will not be powered sufficiently. In this article, we will learn how to make a stepper bot.
Applications of Stepper Motors
Stepper Motors find its application in devices ranging from analog clocks to DVD drives, 3D printers, heating ducts, and CNC machines. Other than these, stepper motors are used in textile machines, printing press machines, gaming machines, robotics, welding equipment, and more. Stepper motors cannot run at high speeds but have a high holding torque. These are used for precise positioning with a motor like robotics, antennas, telescopes, etc.
This brushless synchronous DC motor doesn’t just rotate for an arbitrary number of spins before the DC voltage is switched off. It is used in devices where high precision is the utmost requirement. The stepper motor can easily locate itself to a known and repeatable location/interval. It then maintains that position for as long as needed which is why it is used in high-precision applications.
There are two types of Stepper Motors
- Bipolar Stepper Motors: Bipolar Stepper Motors have a two-phase brushless motor that has two coils (windings). This motor has 4 wires (2 wires for each coil).
- Unipolar Stepper Motors: A unipolar stepper motor is a four-phase brushless motor that has 5 or 6 wires.
How is a stepper motor different from a servo motor?
One of the major differences between the stepper motor and servo motor is pole count. While stepper motors have a high pole count (between 50 and 100), Servo motors have a low pole count (between 4 and 12).
Components Required
| IMAGE | COMPONENT | QUANTITY |
|---|

Stepper Motor with driver
1

Jumper Wires
As Per Requirement

Battery
4

Arduino
1
Building Guide
Step 1: Circuitry of the Robot
- Powering the Stepper motor
- VCC to 5V
- GND / to GND
- Output motor pins to Digital pin 4,5,6,7.
Step 2: Code
- Defining the Motors pins
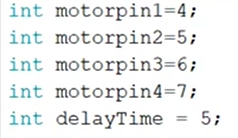
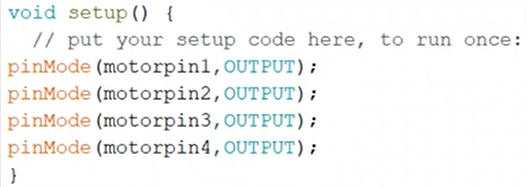
- Initializing the motor pins as output pins.
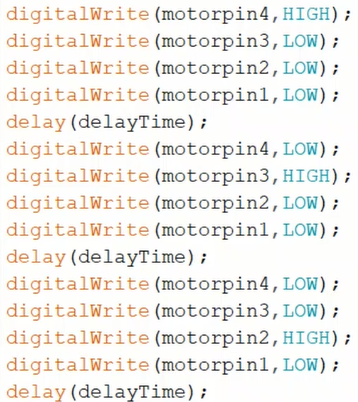
- Use the half load method to rotate the stepper motor.
The following code will help you in creating a stepper bot
Code
DESCRIPTION
DOWNLOAD CODE
Code To Create Stepper Bot Using Arduino
That’s all for this Stepper Bot project. Interested in other similar projects? do leave your comments below.
